Getting Started¶
Welcome to the help documentation for MOMDYN. This page gives an overview of the user interface in the app. Here we will introduce tutorials that introduce the basics of building a dynamics model. This is followed by a discussion of the screens in the app, and some of the details of the interface. For detail on the physical components, check out the section on the Mechanism Module.
Tutorials¶
Below are examples of a simple pendulum and mass-spring-damper. These are standard models that are taught in introductory to intermediate dynamics coursework, and are used to teach the fundamentals of kinematic definition with translational and rotations motions, and equation of motion generation for specified bodies and loads. The tutorials introduce definition of the models using the classic interface, followed by joints to define kinematics
Welcome Screen¶
The first screen you see, with a picture of MOM, and the three basic options, “Create,” “Import,” or “Website.” Tap on the first button to bring up the settings dialog, where you will configure a new model. Tap on the second button to bring up the import dialog, with a list of pre-created examples that are packaged with MOMDYN, as well as any models you have saved as a user. Lastly, tap on the third button to link to the MOMDYN website.
Welcome Menu
Diagram View¶
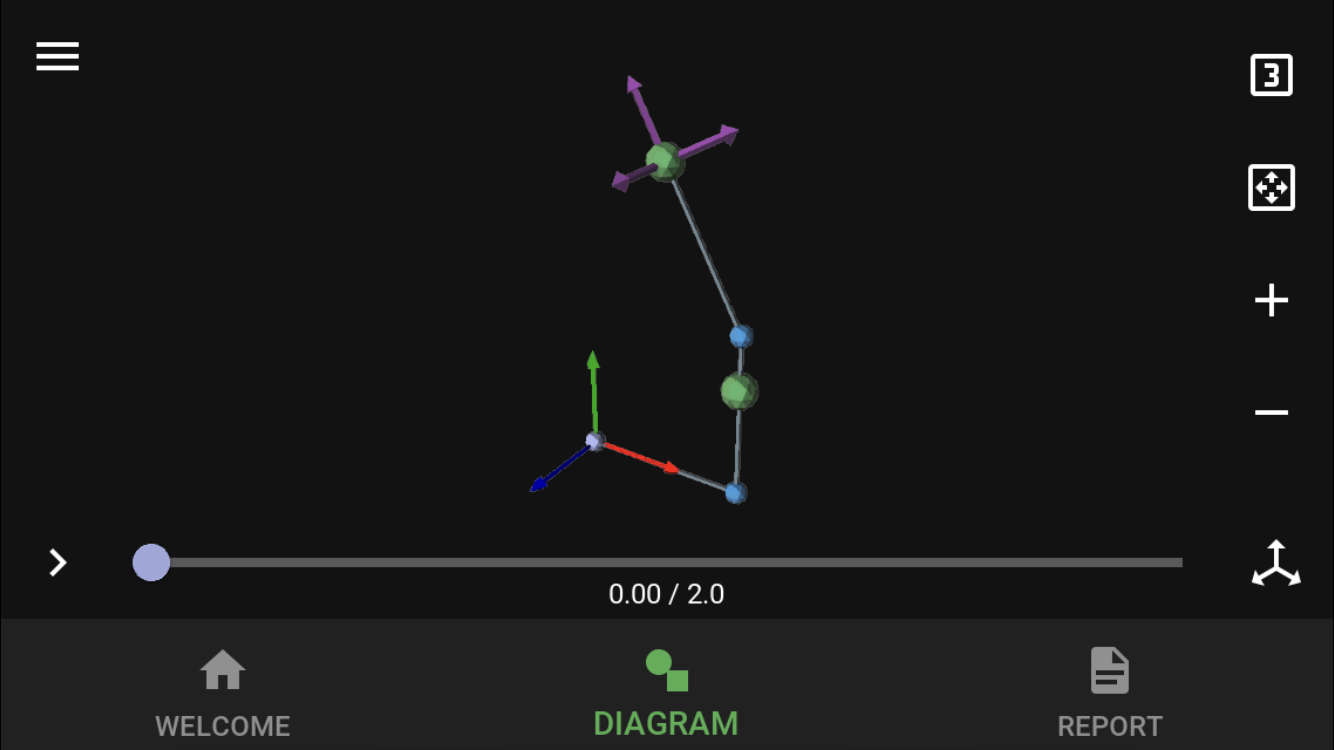
The primary screen for interacting with the model, including updating settings, saving and exporting, adding model components, and visualizing. Drag in the center of the screen to move the model, and use the buttons in the upper right to autoscale, zoom in, or zoom out. The menu button in the lower right brings up settings/save buttons, and expansion panels for each of the dynamics modeling components. The play button in the lower left is used to derive equations of motion (EOM), simulate, and start animations. Tap on the slider bar on the bottom to reposition the animation in time.
Report View¶
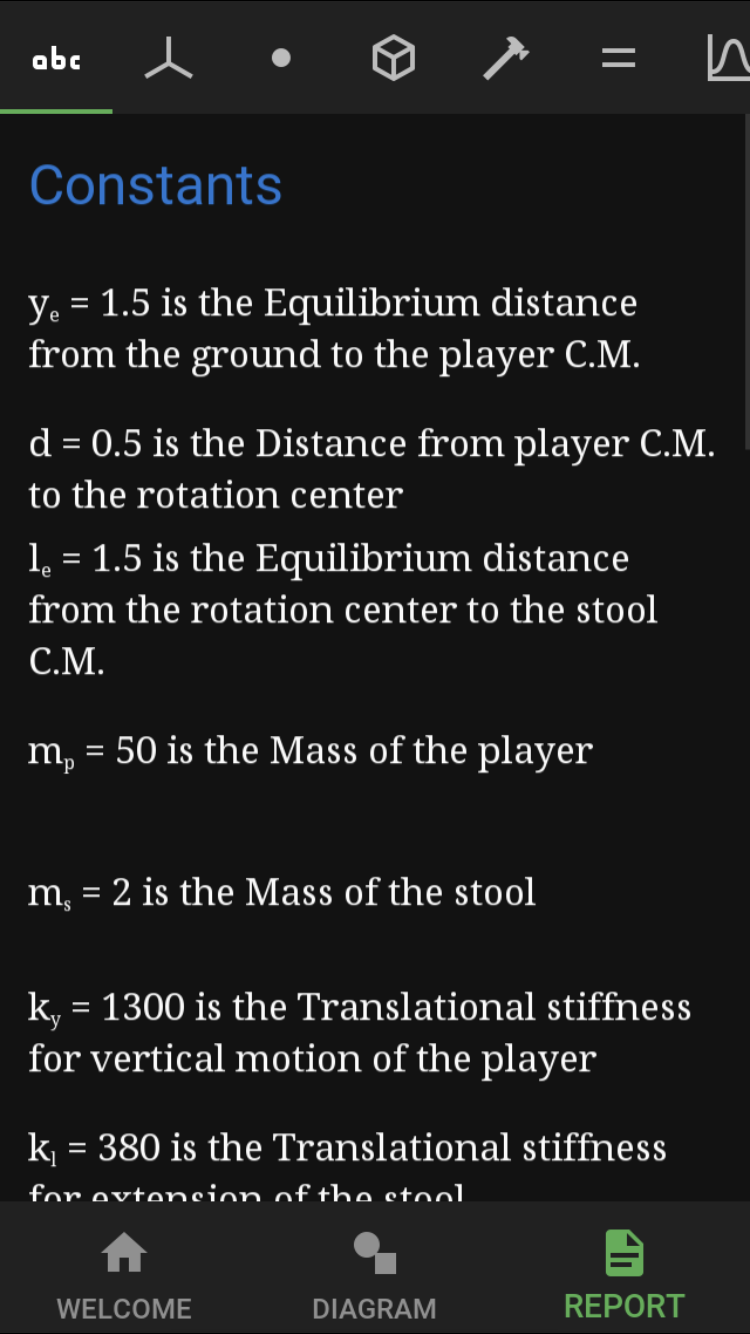
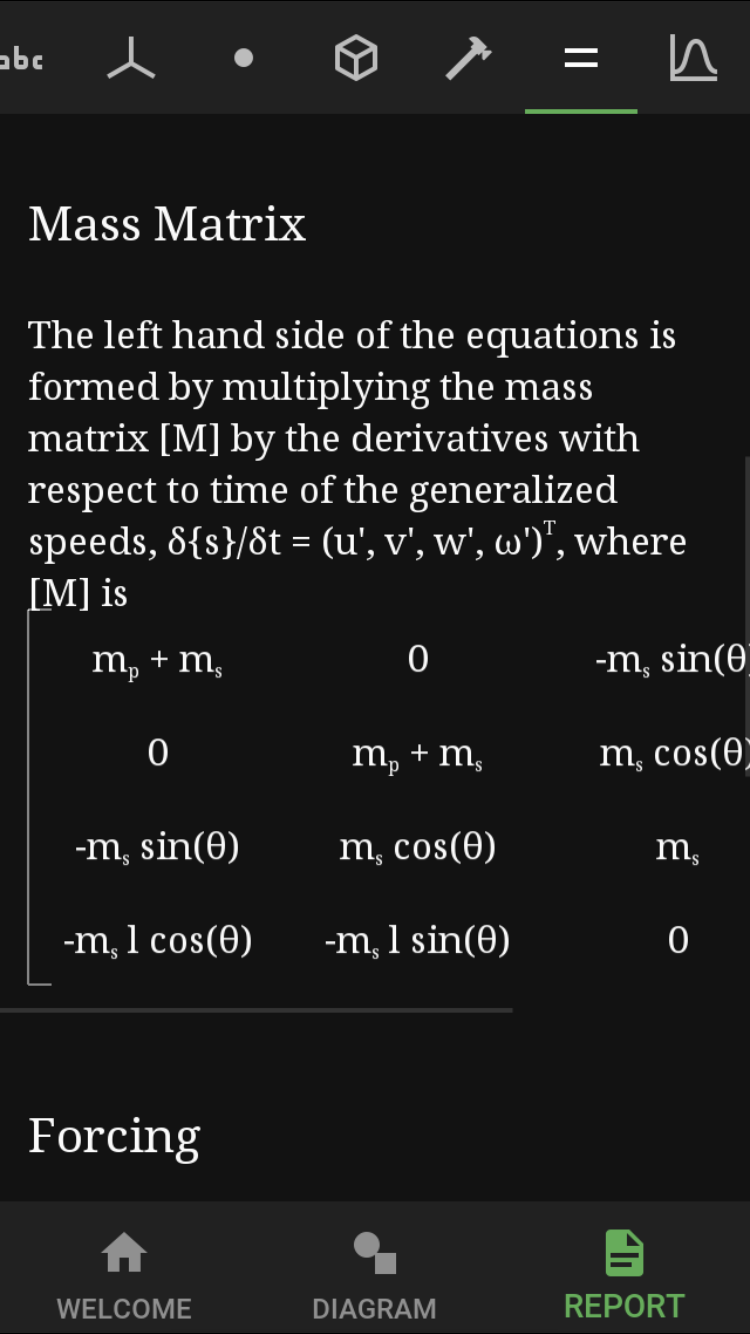
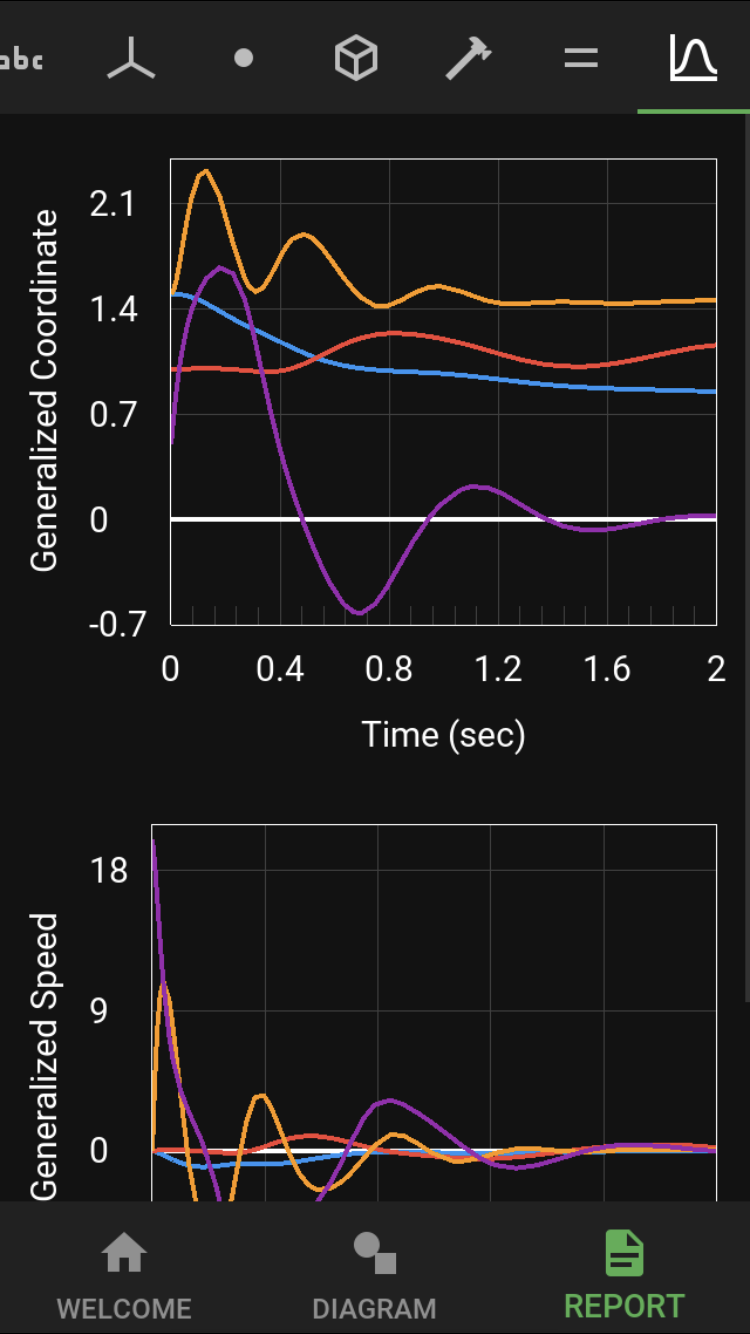
Provides text and mathematical insights important to the dynamicist. At the top of the screen are several buttons which each direct to a different set of report data. Start with the symbolic variables, including the time varying generalized coordinates and speeds, and the constant parameters. Next are the kinematics, including rotating reference frames, vectors, and points. This is followed by the bodies and loads. Finally, once the model has been defined, you may derive EOM which are viewed with the second to last button, and with these EOM run a simulation with plotted data shown with the last button.